


I found a solution that achieves $$$R = \frac{5}{3}$$$.
We first use a solution similar to https://mirror.codeforces.com/blog/entry/145172?#comment-1299054 as our base.
We can rotate the solution 45 degrees, as shown in the diagram.
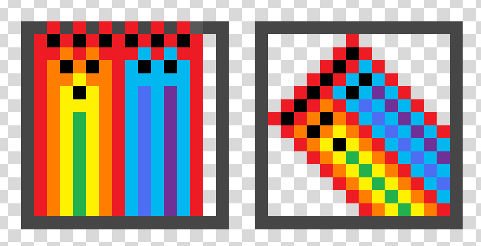
This now occupies less of the $$$2N \times 2N$$$ frame, and has some extra space. However, because of its irregular shape, the bounding box is still $$$2N \times 2N$$$.
However, we can slice off two of the corners, then rotate them. (Moving the pink regions to the gold region) This allows everything to fit in a $$$\frac{5}{3} N \times \frac{5}{3} N$$$ frame!

Of course, there is still some empty space (Which we just fill with the root's color, since everything is "insulated"), so perhaps we can do better. Let me know your thoughts in the comments.






